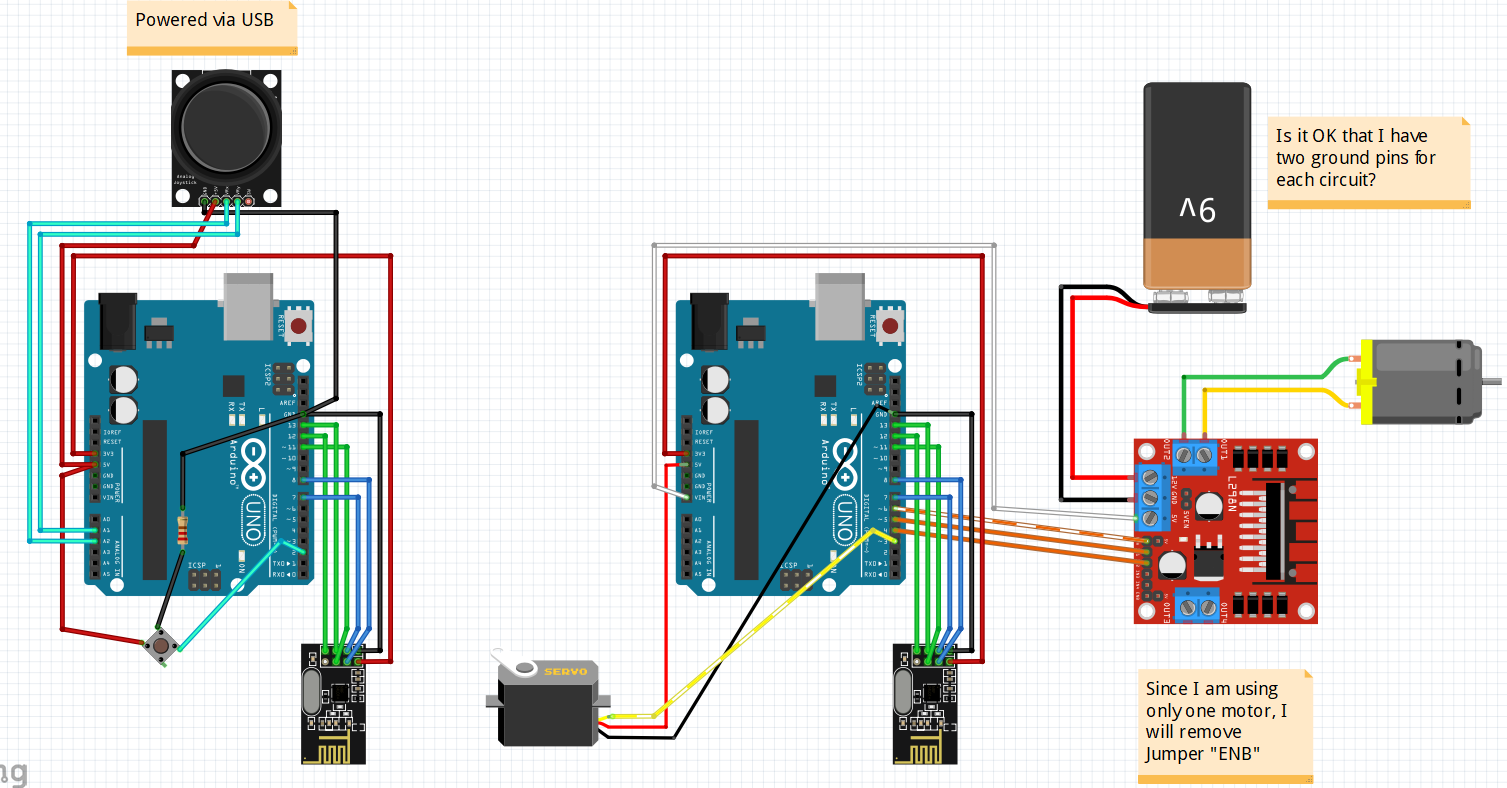
I have these two small circuits, I wanted to ask if it is OK to have two different ground pins here? I’ve read that that can usually not be a good idea, but since I’m using the L298n driver is that ok? Not sure how to connect it otherwise.
I’m a series NOVICE, if anyone spots any issues in my current circuit besides my question it would be so appreciated.
You need to have the Ardunio ground connected to the L298N board ground for the Ardunio data signals (to the L298N board) to make sense. There needs to be a “closed loop path” for the signals.
All of the Arduino board ground pins are connected together internally, so one or more of them can be used in any combination. But a ground from the L298N board needs to connect to one of the Arduino ground pins.
We have a similar introduction project using the NRF24L01 radios. They use too much power to be reliable when powered from the Arduino 3.3Volt line. Instead, we added 3.3V regulator powered from the Arduino 5V line.
Powering the motor from a 9V battery may not work well, depending on the motor. Our “CARBOT” runs from 9 volts as well, but in the form of 6 AA batteries, instead of a single 9V battery. Of course, we are driving 2 motors instead of one, to give 2 wheel tank style “skid” steering, instead of using the servo. The single front wheel is just a caster.
Is that white wire from the L298N board to Arduino Vin intended to power the Arduino? If so, that needs to come from the 12V connection (which is really 9V). It would also be another reason to need to connect the ground. The 5V terminal is to be used if the L298N is “getting” power from that line. It is not a 5V output. At least not for the L298 boards I am familiar with. We use a motor shield, so that part of the wiring is simpler.
I did not check the connections for the NRF24L01 radios, some of which could depend on the software being used.
Thanks for the awesome and in-depth reply @microMerlin ! My comments:
Makes Sense!
Hmm I might look into this, I will try to find a regulator. Never used one before (Or many other things for that matter haha)
I may be planning to switch to LiPos in series in the future, but my design has a requirement for rack and pinion/servo steering
My understanding of L298N is that it is powered from the 12V line, and as long as you do not exceed 12V into that module, the 5V line provides regulated Voltage out. Then my understanding of the Arduino 5V pin is that Yes, usually it is an output. BUT it can be powered by (MUST BE REGULATED) 5volts. I saw this in a few places, and I’m hoping it’s the case so I can use a higher voltage battery without needing a seperate battery to power the arduino.
Let me know what you think!
Thanks so much for helping out a newbie!
-Vasko
As I said at the end of the previous comment. For the boards I am familiar with, the 5 Volt pin is not an output. I do not know all the boards. If you have documentation that says otherwise, then good to go.
Should be easy enough to test … Without connecting the 5V to that Arduino board, put a meter from ground to the 5V terminal, and see what it says. Better, also add a simple load there as well. A motor that runs on 5V would be good.
Check the functionality and constraints for those 5VEN pins as well.
5V.This pin outputs a regulated 5V from the regulator on the board. The board can be supplied with power either from the DC power jack (7 - 12V), the USB connector (5V), or the VIN pin of the board (7-12V). Supplying voltage via the 5V or 3.3V pins bypasses the regulator, and can damage your board. We don’t advise it.
It is advised to not power the uno, or any other arduino board, via the 5v pin. The 5v pin is connected to the output of a 5v voltage regulator on the uno. Yea, sure, you could probably do it, but why take the chance on it? 7-12v on the VIN pin, or the dc jack, is what’s recommended.
You already show a 9 volt power source, so why not just connect that to the VIN or the dc jack? You also hint at lipo batteries, a 2 cell lipo is 7.4v and a 3 cell lipo is 11.1v, so why not ust play it safe and plug that into the dc ack or the VIN pin?
In the future I will be upgrading motor and battery sizes beyond what Arduino can handle from it’s Vin port, so I was trying to find a solution that would not require a separate battery. So far my only ideas are to get an arduino pro mini with a 5V input that I could use via the L298 or simply add a 9v separately to power the arduino. Any other ideas let me know thanks!
Side note, the circuit/code works now! Connecting ground pins was the mistake, and while I’m using the 9V I decided I might as well play it safe and used the Vin pin.
One more option is to add an extra voltage regular attached to the the motor battery, to bring it down into the range that the Arduino can handle directly. Either through the additional regulation on vin or the barrel jack, or directly to 5V (or 3.3V depending on which Arduino board. I like the separate battery for the Arduino board. The Arduino probably needs a lot less power than the motor(s) for general use, and the separate battery would let the Arduino (and radio) to continue running even if the motor battery goes flat. Using a single battery, with whatever regulation / connection, can cause ‘brown out’ on the Arduino when the battery starts getting weak, and the motor draws a surge of current when first starting up.
The buck converter option is way more efficient (around 90+% ) than the 7805 approach. As well for a bit more money and size they make boost/buck converters which can produce a regulated output voltage from a source higher or lower than the output voltage (a buck converter requires a higher input voltage than output voltage and a boost converter requires a lower input voltage (at more current) than the output. Sometimes in a battery circuit the boost/buck is the best bet, since when the battery is charged up the input voltage is higher than the output, but as the battery voltage drops the input is less than the output. You do in that case need to make sure you don’t over drain the battery (lipos can be damaged by being over discharged!)