Hello Fritzing community,
I am working on a robotics thesis project using a Raspberry Pi 5, and I need help creating a custom part for the YDLIDAR X2 sensor.
I am looking for a part that represents the entire assembly (Lidar + Adapter Board + USB Cable) as a single connected unit, rather than just the standalone sensor.
1. Reference Images (Style & Context)
-
This photo shows exactly how I need the part to look.
-
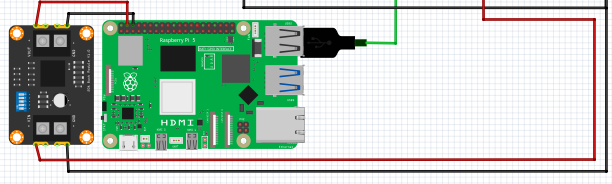
A screenshot of my current design showing where I intend to connect it (USB Port).

2. Dimensions / Mechanical Drawings❗
- Mechanical drawing of the Lidar unit.
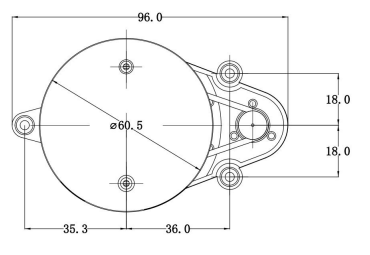
(I have attached the image from the datasheet to ensure the part is created to the correct scale).
3. Specific Design Requirements
- Visual Representation: Please follow the linear arrangement shown in the reference photo.
- Simplification: You do not need to detail the specific colored wires. A simple black cable representation connecting the components is perfectly fine to save time.
4. Technical Documentation
- Part Name: YDLIDAR X2
- Manufacturer: EAI Technology
- Datasheet (PDF): https://cdn.robotshop.com/media/y/ydl/rb-ydl-04/pdf/ydlidar-x2-360-laser-scanner-datasheet2.pdf
Thank you very much for your time and support!