how to make a simple robot line follower and obstacle avoider without microcontroller
You would need to replace the micro controller with hardware logic such that when the error signal occurs because the device is off course the motors or steering corrects in the right direction. A micro controller is one way to do that but discrete logic is another (usually harder!) way to do that.
Peter
Peter
search for “analog line follower”
I need to use a line follower no coding no microcontroller. I need help on how to stop or using a buzzer sound (just need schematic), when it hit a box or obstacle on the line then it can stop make a sound when obstacle removed it continue its path.
You will need two optical sensors, one to detect and follow the line (driving the motors left or right when the edge of the line is detected) and one (or a mechanical switch) to detect the box then stop the motors until the box is removed. The same logic used by any of the line following programs can be duplicated in standard logic gates to avoid the microcontroller.
Peter
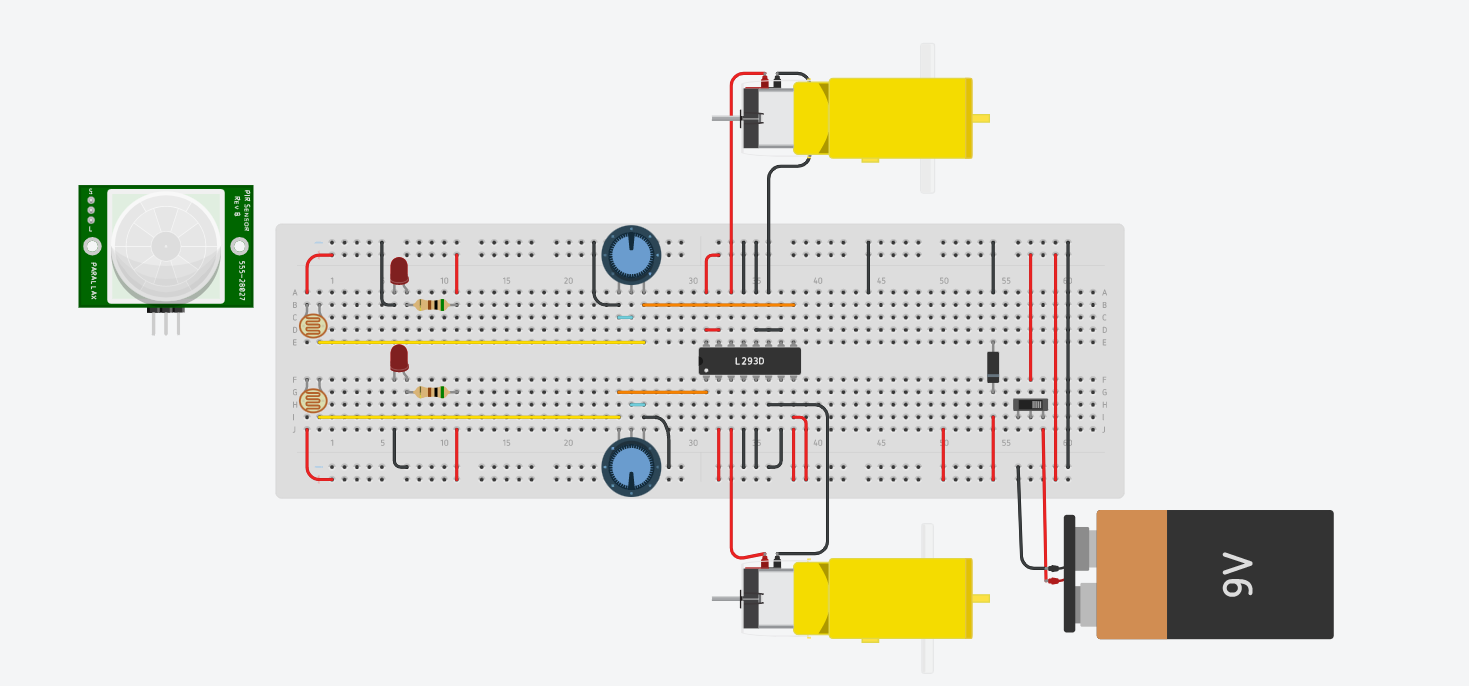
Urgent help needed how to connect the pir sensor here which pin numbers i tried with a hex inverter 74hc04 but nothing worked. I need the PIR sensor when motion detected to stop both engines please pin wiring advice needed urgent.
1 Like
From
555-28027-PIR-Sensor-Prodcut-Doc-v2.2.pdf
It looks like the right most pin should be ground, the middle pin VCC and the left pin signal. Note it indicates it needs up to around 40 seconds to calibrate itself. There is also a jumper somewhere for continuous or single output mode. If you have it set for continuous it may not go low if it is triggered, I would try changing the jumper and see if that helps.
Peter
555 timers are one way to do it. And on the same site just using BC 108 transistors: